يكي از مشكلات و مسايلي كه همواره مهندسان با آن مواجه و همواره در پي كشف و اختراع روش هاي جديدي براي آن بودند بحث انتقال نيرو و توان بود. در ابتدا از روش هايي همچون چرخهاي اصطكاكي، تسمهها و... استفاده شد كه اين روش ها داراي معايبي همچون عدم انتقال توانهاي بالا، ساييدگي زودهنگام، عدم انتقال توانهاي متغير و … بودند كه نهايتاً منجر به اختراع چرخدندهها شد.
استفاده از چرخهاي اصطكاكي چندان بد نبود اما به مرور كه اينها استفاده ميشدند در حالت غلتشي اين دو چرخ لغزش اتفاق ميافتاد نهايتاً به اين فكر افتادند كه وسيلهاي اختراع كنند كه همان حالت حركت غلتشي را داشته باشد اما از طرفي امكان ايجاد حالت لغزش وجود نداشته باشد و اين كار با اختراع چرخدندهها متبلور گشت. در چرخدندهها منحنيهاي دو دنده درگير از دو چرخدنده حالت غلتش دارند كه به علت وجود دندانههاي پشت سرهم امكان لغزش وجود ندارد...
پروژه مورد نظر مشتمل بر پنج (5) فصل، 88 صفحه، تایپ شده، به همراه تصاویر رنگی، دیاگرام، فرمول ها و روابط ریاضی، با فرمت word جهت دانلود قرار داده شده تا به راحتی کاربر بتواند آن را به میل خود در صورت نیاز ویرایش نماید و فصل بندی پروژه به ترتیب زیر می باشد:
فصل اول: آشنايي
* مقدمه
* معايب و محاسن چرخ دنده ها
* فرم هاي مختلف منحني چرخ دندهها
* پارامترهاي كنترلي چرخ دندهها
* انواع چرخ دندهها
* پارامترهاي ابعادي چرخ دنده ها
* برش زيرين در دندانه هاي چرخ دنده و اصلاح سر دندانه
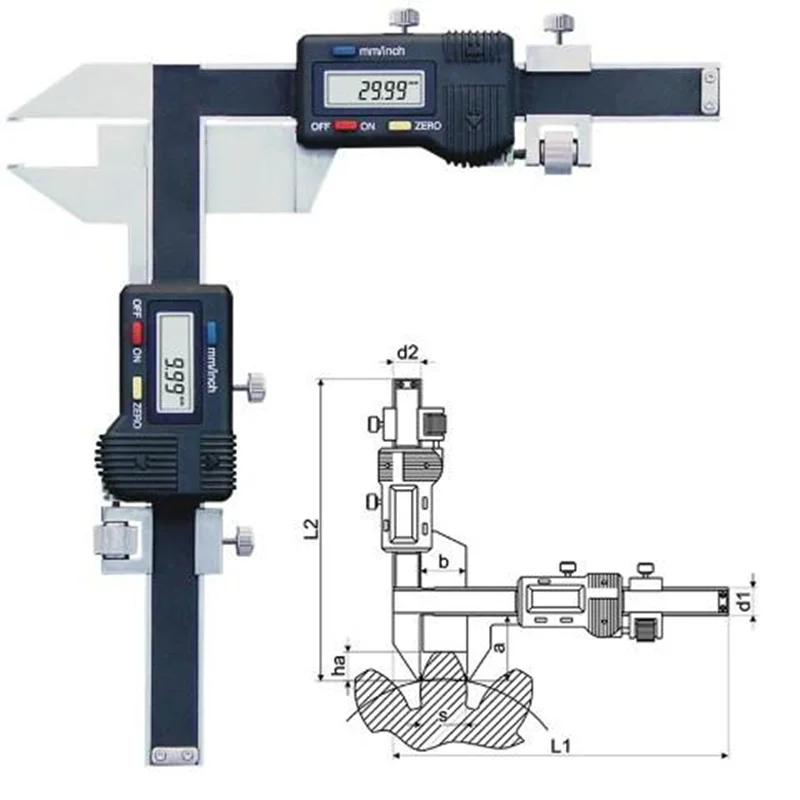
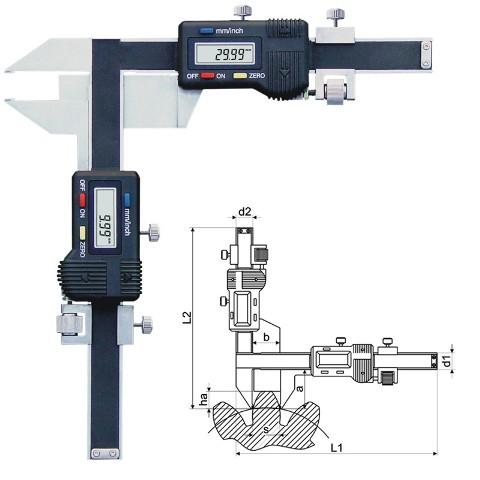
فصل دوم: اندازه گيري ضخامت دندانه در چرخ دنده هاي ساده و مارپيچ
* کولیس ضخامت سنج (دوبعدی)
* ميكرومتر با فك هاي بشقابي
* استفاده از هندبوك ها
* استفاده از فرمول و محاسبات
* اندازه گيري ضخامت دندانه به روش وتر ثابت
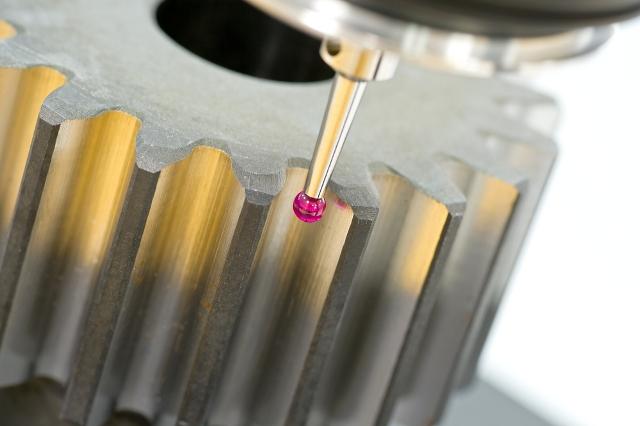
فصل سوم: تست عملكردي چرخ دندهها
* تست دوراني Rolling Test
* تست پاركسون
* مزايا و معايب تست دوراني
* تعيين ميزان تلرانس مجاز براي خطاي مركب
* چرخ دنده مبنا
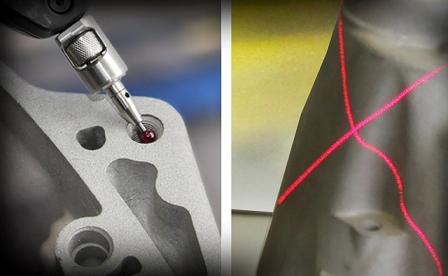
فصل چهارم: روش هاي تست منحني اينولوت
* انواع روش هاي تست منحني اينولوت
* تعيين ميزان تلرانس مجاز براي شكل منحني اينولوت
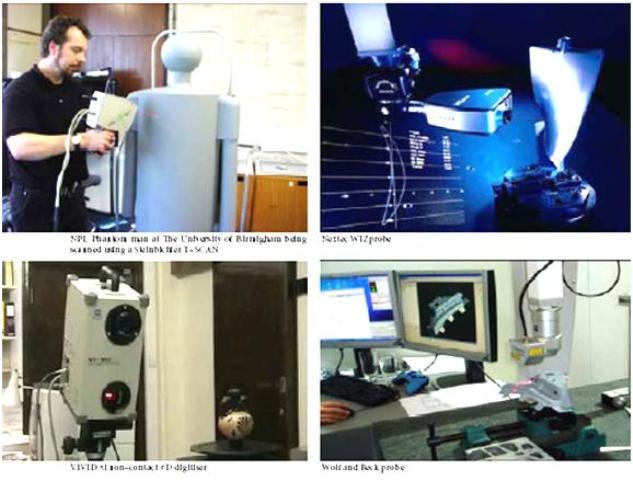
* بررسي روشها و مكانيزم هاي دستگاه هاي مختلف براي تست منحني اينولوت دنده
* دستگاه تست فرم اينولوت David Brown
* اندازه گيري مستقيم انحرافات منحني دنده با استفاده از روش جابجايي دنده
* روش تست منحني دندهها با استفاده از دستگاه تقسيم و بلوكهاي يوهانسون
* تست منحني اينولوت چرخ دنده ها با استفاده از ديسك و اسلايد
* بازرسي منحني دندهها با استفاده از دستگاه مخصوص
* بررسي كليه پارامترهاي موجود در دياگرام حاصل از تست منحني يك چرخ دنده مارپيچ
فصل پنجم: استفاده از پين يا سيم براي اندازه گيري پارامترهاي دنده
* اندازه گيري چرخ دنده ها با استفاده از پين يا سيم
* اندازه گيري چرخ دنده هاي ساده
* اندازه گيري M در صورت اعمال لقي به دو چرخ دنده درگير
* اندازه گيري در حالت كلي
* اندازه گيري چرخ دنده هاي مارپيچ
* اثبات فرمول اندازه بهينه پين
پيوست
منابع
این پروژه می تواند به عنوان یک منبع قوی درسی جهت دروس اندازه گیری دقیق و آزمایشگاه (اندازه گیری چرخ دنده ها) توسط دانشجویان در دانشگاه استفاده گردد.

جهت دانلود پروژه روش های اندازه گیری ابعادی چرخ دنده برلینک زیر کلیک نمایید:
پروژه روش های اندازه گیری ابعادی چرخ دنده (Gear Measurement)

 تکنولوژی ماشینکاری
تکنولوژی ماشینکاری ماشین های ابزار
ماشین های ابزار راهنمای قوی و جامع سالیدورکس 2015 برای کاربران مبتدی و سطح متوسط
راهنمای قوی و جامع سالیدورکس 2015 برای کاربران مبتدی و سطح متوسط اصول تفکیک آپارتمان ها و نحوه کار با نرم افزار واسط کاداستر
اصول تفکیک آپارتمان ها و نحوه کار با نرم افزار واسط کاداستر روش های اجزاء محدود مقدماتی پروفسور عیسی سلاجقه
روش های اجزاء محدود مقدماتی پروفسور عیسی سلاجقه جزوه آموزشی درس طراحی مکانیزم های دانشگاه امیر کبیر
جزوه آموزشی درس طراحی مکانیزم های دانشگاه امیر کبیر پروژه مدلسازی و شبیه سازی توربین بادی مجهز به DFIG و STATCOM
پروژه مدلسازی و شبیه سازی توربین بادی مجهز به DFIG و STATCOM کتاب ماشین های تزریق پلاستیک
کتاب ماشین های تزریق پلاستیک دانلود نرم افزار شبیه ساز 3 بعدی دستگاه های سی ان سی Nanjing Swansoft CNC Simulator
دانلود نرم افزار شبیه ساز 3 بعدی دستگاه های سی ان سی Nanjing Swansoft CNC Simulator در نرم افزار CATIA") نحوه ایجاد رزوه های اینچی (Inch Thread) در نرم افزار CATIA
نحوه ایجاد رزوه های اینچی (Inch Thread) در نرم افزار CATIA پروژه با عنوان: طراحی مخازن تحت فشار افقی و عمودی به همراه مقالات و جزوات کاربردی
پروژه با عنوان: طراحی مخازن تحت فشار افقی و عمودی به همراه مقالات و جزوات کاربردی پروژه با عنوان: تعمیر و نگهداری قطعات جوشی در محیط فضا
پروژه با عنوان: تعمیر و نگهداری قطعات جوشی در محیط فضا به روش هيدروفرمينگ") مقاله با عنوان: مطالعه امکان ساخت يک قطعه از بدنه خودرو (پوسته گلگير) به روش هيدروفرمينگ
مقاله با عنوان: مطالعه امکان ساخت يک قطعه از بدنه خودرو (پوسته گلگير) به روش هيدروفرمينگ در نرم افزار SolidWorks") آموزش سالیدورکس، طراحی و مدلسازی چرخدنده ساده (Spur Gear) در نرم افزار SolidWorks
آموزش سالیدورکس، طراحی و مدلسازی چرخدنده ساده (Spur Gear) در نرم افزار SolidWorks کتاب تشریح کامل مسائل مکانیک محیط های پیوسته برای مهندسان
کتاب تشریح کامل مسائل مکانیک محیط های پیوسته برای مهندسان